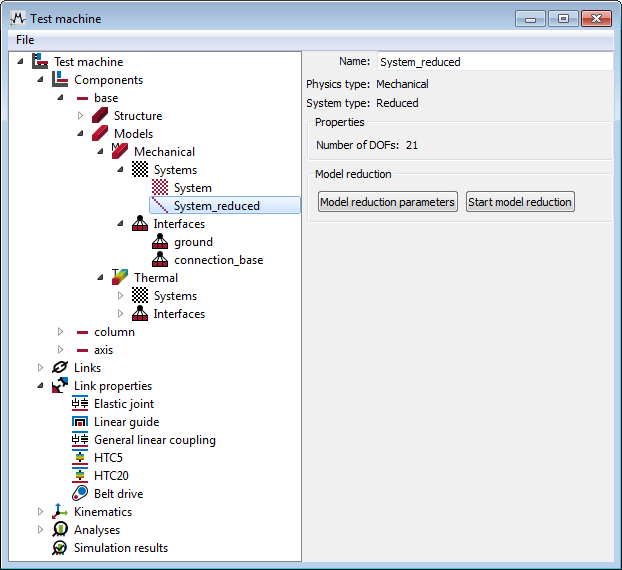
MORe is written in Python and offers a clean API, and can thus be used from the console or be scripted. A mixed workflow with tasks performed with the GUI and repetitive tasks automatised using scripts lets you handle vast modelling problems efficiently.