Cascade¶
Introduced in MORe v3.1
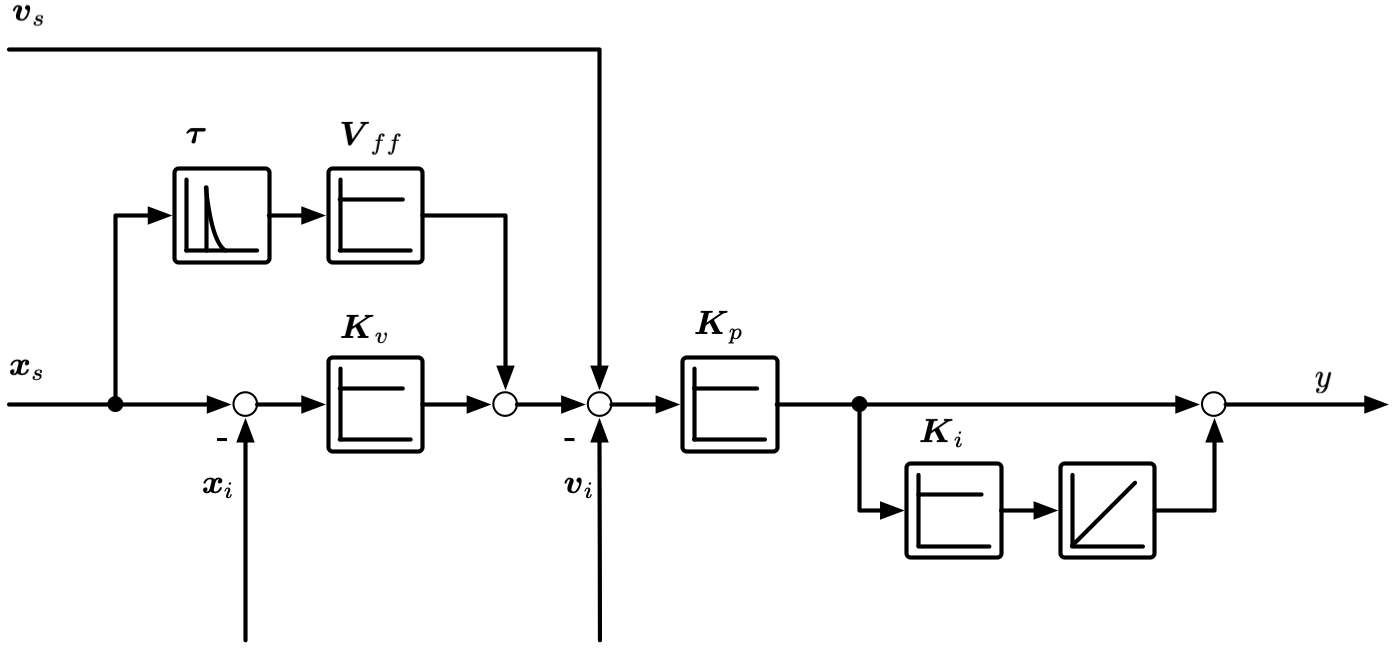
Represents a cascaded loop with a velocity loop and a position loop.
Block diagram¶
Signal |
Description |
|---|---|
\(v_s\) |
Velocity setpoints |
\(x_s\) |
Position setpoints |
\(v_i\) |
Velocity feedback |
\(y\) |
Force/torque command value |
Loop settings¶
Velocity Loop Closed¶
Disable to open the velocity feedback loop.
Position Loop Closed¶
Disable to open the position feedback loop.
Scaling parameters¶
Setpoint to position scaling¶
Scaling value used to scale the setpoints for the controller. Makes it possible to use linear position setpoints in data tables for controllers with indirect feedback (only motor position). Use “Position command value with setpoint scaling” in the controller command load for transient jobs.
Example: Ballscrew drive with indirect feeback. Set the scaling value to \(2*pi/hs\) (hs: spindle pitch).
Position to velocity encoder ratio¶
For controllers with two different feedback sources (e.g. linear scale for position feedback, rotary encoder for velocity feedback), the linear velocity setpoint generated by the position loop needs to be scaled to rotary velocity setpoint for the velocity loop.
Example: Ballscrew drive with direct (linear scale) feeback. Set the scaling value to \(2*pi/hs\) (hs: spindle pitch).
Controller gains¶
Variable |
Units linear |
Units rotary |
Description |
|---|---|---|---|
\(K_v\) |
\(1/s\) |
\(1/s\) |
Proportional gain of the position controller |
\(K_p\) |
\(N s/m\) |
\(Nm s/rad\) |
Proportional gain of the velocity controller |
\(T_{ni}\) |
\(s\) |
\(s\) |
Integral time |
Feed forward¶
Variable |
Units linear |
Units rotary |
Description |
|---|---|---|---|
\(V_{ff}\) |
\(-\) |
\(-\) |
Velocity feed-forward gain |
Feedbacks¶
Feedback source¶
Select “Link” to use a link output as feedback (direct feedback). If the controller contains a motor, an output of the motor can be selected (indirect feedback).
Link Selection¶
Only visible if selected entity is “Link”. Select a link to be used as feedback.